
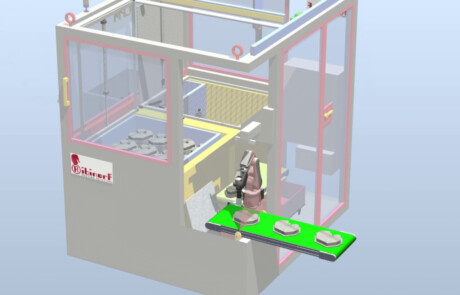
La Containerizing Portable Machine está diseñada para apilar piezas planas o embutidas en contenedores. Su objetivo es apilar las piezas que salen de la prensa sin detener la prensa para cambiar de envases. La producción de la máquina puede llegar hasta las 30 piezas/minuto, lo que significa que es capaz de procesar grandes cantidades de piezas en poco tiempo. Además, cuenta con un AIP (Asistente Inteligente Programación) que se encarga de autoprogramar las piezas y el mosaico en el contenedor de destino en tan solo un minuto.
Necesidades clave para una producción eficiente y segura
- Automatizar la descarga de piezas en los procesos de producción, lo cual implica un proceso de bajo valor añadido y un elemento de coste en la producción.
- Reducir la necesidad de mano de obra directa, lo que puede aumentar la eficiencia y reducir los costos de producción.
- Cubrir la falta de mano de obra liberando operarios para tareas más complejas y de mayor valor.
- Reducir los riesgos de lesiones y accidentes, así como mejorar las condiciones de trabajo en general, lo que puede aumentar la satisfacción y la productividad de los trabajadores.
Funcionamiento del Containerizing Portable Machine to Bin or Containers

1.Las piezas entran por la cara correcta sin importar su posición.
2.Un sistema de escaneo 3D localiza la posición de la pieza en movimiento, determina un punto de cogida viable, de manera que se pueda programar su ubicación.


3.Un dispositivo magnético agarra la pieza por la zona de sujeción determinada. La garra magnética es multiformato, con un imán neumático que permita la sujeción desde uno o varios puntos (según tamaño de pieza) para adaptarse a múltiples formatos.
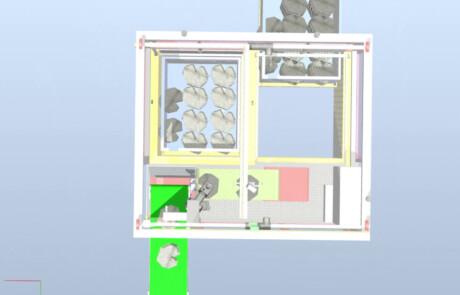
4.Las piezas se depositan creando una pila en una zona intermedia.


5.Otro escáner 3D, se encarga de la localización de la posición del contenedor de destino y de la posición en que ha quedado la pila de piezas creada anteriormente, para seguir el apilado, aunque esta se haya movido. También se encarga de validar que exista espacio vacío donde se quiere colocar la pila dentro del contenedor. Todo ello, para evitar colisiones y adaptarse al proceso. Cuenta también con un sistema de doble contenedor de salida para evitar paros al llenar el contenedor.
6.Una vez se crea una pila completa y localizado el contenedor de destino, un robot cartesiano la recoge para dejarla dentro del contenedor. En caso de que sea necesario voltear algunos modelos, se puede utilizar un dispositivo interno en la máquina para realizar esta tarea y así no aumentar el tiempo de ciclo del robot.

LA MÁQUINA ESTÁNDAR QUE SE ADAPTA A TUS NECESIDADES
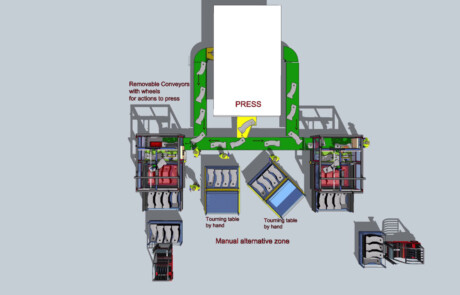
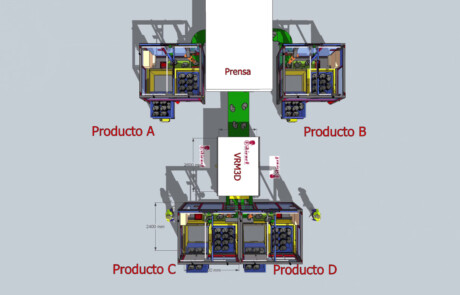
La Containerizing Portable Machine es completamente personalizable y adaptable a diferentes tamaños de piezas y contenedores, lo que significa que se puede ajustar a las necesidades específicas de cada empresa. Además, cuenta con módulos simétricos que permiten paletizar doble salida de piezas por la parte frontal y paletizar piezas que salen por los laterales y no por la parte frontal.
En el contenedor de destino, la máquina asume que puede dejar las piezas en un punto fijo, y en el caso de las columnas, estas no se moverán y se pueden seguir apilando en un punto fijo. Podemos agregar un escáner 3D que, utilizando el CAD del contenedor, nos permita reubicar no solo la posición del contenedor, sino también la ubicación del hueco para cada pila. De esta manera, la deformación del contenedor no afectará el proceso.
Además, el diseño mecánico y eléctrico, así como los dispositivos, están preparados para integrarse con un AGV que mueva los contenedores. El transporte del contenedor por AGV siempre se realiza sobre un carro que lo mantiene elevado dentro de la célula, pero en caso de trabajo manual, se puede requerir trabajar con el contenedor en el suelo. Nuestra opción permite tanto trabajar con AGV como de forma manual elevado por carretilla elevadora.


LA MÁQUINA NON-STOP
Gracias a nuestra experiencia en VR e IA, la Containerizing Portable Machine cuenta con un Asistente Inteligente Programación (AIP), lo que permite aprender automáticamente cada pieza en solo 5 minutos con la asistencia de un operario con bajo conocimiento técnico. Esto es especialmente útil ya que, en muchos casos, los clientes disponen de cientos de modelos diferentes, lo que implicaría una programación manual compleja y costosa, de personal especializado, de entre 2 y 4 días por formato.
El proceso consta de varios pasos. Primero, se vacía la máquina para prepararla para el siguiente modelo de pieza que se coloca en la entrada de la cinta debajo del escáner de Visión 3D, asegurándose de que esté posicionada en la cara correcta. Seguidamente se pasa de nuevo la pieza por la cara contraria.
En este punto, el escáner realiza varias funciones. Primero, memoriza la forma de la pieza en 3D y la orientación correcta. Luego, identifica el centro de gravedad y verifica si ese punto es adecuado para recoger la pieza. Si hay algún relieve en la pieza, el sistema desplaza el punto de cogida hasta un punto adecuado. Es importante señalar que el operador también puede modificar el punto de cogida si es necesario.
Con el contorno de la pieza ya determinado, el sistema determina la posición de la pila en la cinta de apilado. Usando las dimensiones del contenedor de salida, el sistema crea un mosaico de dejada para asegurarse de que quepan el máximo de columnas en el contenedor de destino. Por último, el formato queda programado y la línea está lista para producir piezas del nuevo modelo.









Características adicionales
- La máquina es portable y transportable mediante un puente grúa, y no requiere fijación si no hay riesgo de colisión, lo que permite cambiar su ubicación de manera rápida y sencilla.
- La máquina se instala en 1 día y requiere de 1 semana de ajuste en producción.
- El retorno de la inversión es inferior a 2 años.
- Es fácil de utilizar y no necesita personal altamente capacitado para su operación.
- No necesita herramientas especiales para cada formato.
- Cuenta con una cámara IP que graba la producción durante varios días, activándose solamente cuando detecta movimiento, con acceso remoto para ver las grabaciones.
- Acceso remoto a través de la red móvil 4G para mantenimiento, reparaciones y formación en el robot, escáner, consola y cámara.
- Una Tablet para comunicación en línea y formación.
Descargas

Ficha técnica Containerizing Portable Machine to Bin or Containers
Enviar enlace de descarga a:
